“白兔-重启”项目及其研发公司ispace的发展历史可以追溯到“谷歌月球X大奖赛”(Google Lunar XPRIZE)。日本东北大学的研发团队加入到荷兰“白标”(White Label)团队参与该大赛。此后荷兰团队由于资金问题退出,项目由日本团队整体接管。日本团队考虑到资金筹措问题,于2013年成立了ispace公司,同时,将团队名称改为富有日本神话寓意的“白兔”。“白兔”团队在2017年成为大奖赛的5支最终入选团队之一。2018年,大奖赛在没有团队完成目标的情况下结束,不过其带动了商业公司广泛参与月球探测,包括“白兔”在内的多支队伍在大奖赛后期建立商业模式及后续商业探测计划。
2018年,ispace公司宣布前两次发射任务,以白兔-R命名,其中R代表着“重启”(Reboot),标志着谷歌月球X大奖赛中“白兔”项目的重新启动。“白兔-重启”的着陆器可运送30kg的有效载荷到月球表面。白兔-重启-任务-1(HAKUTO-R-Mission-1)于2022年12月11日发射,由于软件问题,估算高度出现误差,在2023年4月26日的着陆过程中失败。
首次任务失败后,ispace公司对着陆器的软件系统与传感器进行了深入复盘和技术迭代,进一步明确了后续任务的改进方向,稳步推进白兔-重启-任务-2的准备工作。2024年初,ispace完成了任务-2着陆器的地面验证与总装测试,计划采用优化后的系列-1(Series-1)平台再次挑战月球软着陆。
任务目标
此次任务与白兔-重启-任务-1同样,选择了冷海(Mare Frigoris)地区着陆,此次的着陆区域是较为平坦的中部地区(N60.5°、W4.6°),该区域地表覆盖着玄武岩熔岩,可为研究月球历史提供重要线索。此次任务还计划将6种用户有效载荷运输至月面,其中包括ispace欧洲子公司研制的坚韧号(Tenacious)月球车。
系统组成
白兔-重启-任务-2与任务-1都使用了系列-1着陆器。该型着陆器宽约2.6m、高约2.3m(着陆架伸展状态)、干质量约340kg,顶部可装载约30kg的有效载荷。基于对任务-1月面着陆失败原因的分析,设计人员对任务-2的着陆器软件进行了优化,扩大了着陆仿真范围,同时对着陆系统传感器增加了测试,进一步提升了着陆的精准度。
主推进器型号为A2200,由美国敏捷太空工业公司(Agile Space Industries)提供,位于着陆器底部,用于在轨道机动期间的加速和制动,并在软着陆时提供反向推力。推进剂系统由两个一甲基肼(MMH)燃料箱和两个四氧化二氮(NTO)氧化剂箱组成。系统通过焊接钛管输送氦气,将推进剂推入推进器燃烧室。6个辅助推进器安装在主推进器周围,通过脉冲喷气为加速和制动提供额外的推力。“反作用控制系统”(RCS)由着陆器顶部和底部的8个小型推进器组成,推进器喷射气体脉冲改变着陆器的姿态以及保持指向。
着陆器的巡航过程中,其“制导、导航与控制”(GNC)系统使用传感器自主控制推进发动机。在降落过程中,着陆器会点火以降低速度,同时在GNC传感器的帮助下监测周围环境。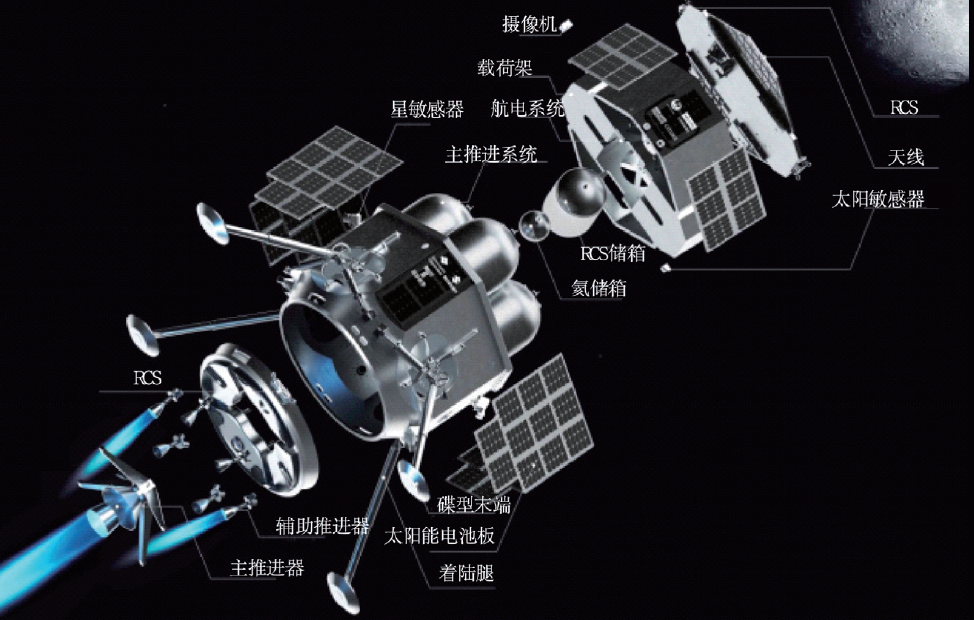
图1 “白兔-重启”的系列-1着陆器拆解示意图
任务过程
ispace公司为这次任务设置了10个任务里程碑(见表1)。此次任务采用了消耗燃料较低的转移轨道。在进入地月转移轨道后,探测器于2025年2月15日进行了月球飞越,地球和月球引力对其影响较小,太阳的引力将改变探测器的轨道并使其相对于月球减速,节省进入月球轨道后的推进剂。5月6日,探测器按计划成功进入椭圆月球轨道,随后数周内通过一系列轨道机动操作,于5月28日在100km高度的近圆形绕月轨道实现稳定运行。自此,任务完成了前8个里程碑。
表1 白兔-重启-任务-2的10个任务里程碑
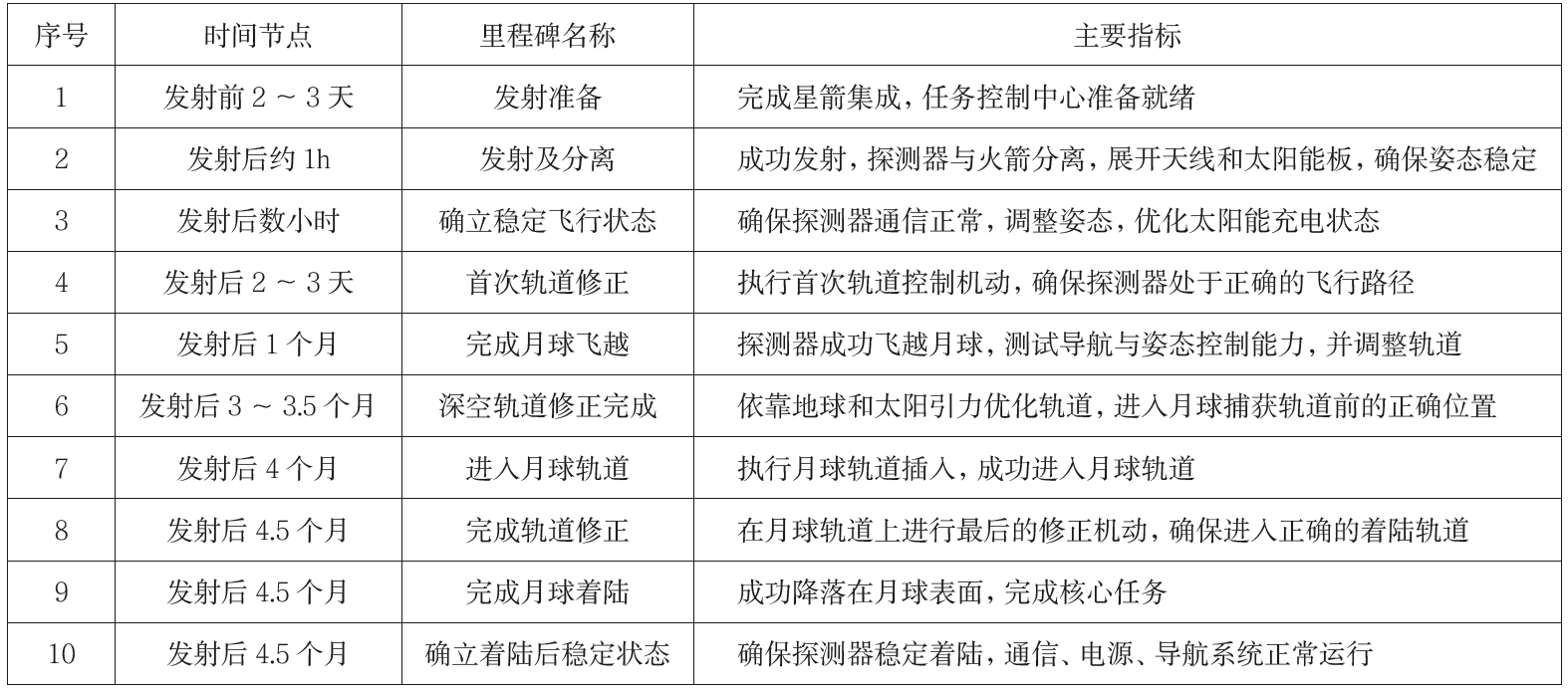
北京时间6月6日凌晨4点13分,东京的任务控制中心向着陆器发送了“执行着陆序列”的指令。着陆器从约100km高度的圆形轨道首先依靠惯性滑行下降至约20km的高度。按照计划,主推进系统点火,开始减速并进行姿态控制,此时高度继续从20km进一步下降。最后阶段,地面站通过遥测数据确认,着陆器的姿态已基本垂直。地面站接收到的最后遥测数据显示,着陆器下降至约50m高度时,飞行速度为187km/h。随后高度显示突然变为223m,通信随之中断。
任务失败原因分析
ispace公司关于任务失败的说明
根据ispace公司在2025年6月24日发布的调查结果,任务-2失败的直接原因在于激光测距雷达未能在设计高度范围内输出有效数据,导致着陆器无法实时获取准确高度信息,错过关键减速窗口。
任务原设计要求在下降至约20km高度时激活激光测距雷达,系统将依赖其从10km~3km的稳定读数进行精准导航。但实测数据显示,着陆器仅在下降至距月面约900m时才开始接收到有效的高度信息,远低于设计预期,严重影响减速控制的时机判断。
ispace指出,此次任务所采用的激光测距雷达型号为未经飞行验证的全新型号,其在飞行条件下的性能明显不及任务-1所使用型号。雷达可能存在激光功率不足、抗动态干扰能力弱、月壤反射率适应差等问题,导致未能在高速下降条件下返回有效数据。最终,尽管推进系统工作正常,姿态控制有效,但由于高度感知失效,着陆器未能及时减速,撞击月面。
上一次任务-1失败情况及改进措施
任务-1同样因高度识别失效而失败,但其根本原因不同。任务-1中,激光测距雷达本身工作正常,但由于飞越复杂地形(阿特拉斯陨坑),高度数据异常上跳,飞控系统误判雷达传感器出现故障,并屏蔽了原本可靠的数据,仅依赖惯性导航系统推算高度,进而误判“已着陆”,提前关闭推进器,造成坠毁。
为解决该问题,ispace在任务-2中对飞控系统进行了两方面改进:第一是优化高度感知算法与容错机制,通过融合多传感器数据源、引入“软告警”机制替代硬性屏蔽,提升对异常数据的容忍与判断能力,避免误杀有效数据;第二是扩大仿真测试覆盖面,引入多样化地形和光照条件的仿真环境,增强系统对真实月面场景的适应能力,确保在复杂地貌下系统仍能保持正确判断与响应。
此次任务失败原因的分析
尽管任务-2针对任务-1的教训进行了系统性改进,包括算法优化与仿真覆盖增强,但最终仍因高度感知失败导致任务失利。这一结果反映出在硬件选型、系统集成和接口联调方面,仍存在未充分识别的风险。
本次任务失败的核心在于激光测距雷达硬件性能不足而非系统调度延迟。其在高速下降时未能在关键高度段(10km~3km)返回可用数据,是导致减速控制窗口丧失的根本原因。
ispace已明确表示,未来任务将引入经过航天飞行验证的雷达设备,并进一步加强飞控系统与传感器之间的集成测试,避免类似失效重现。
任务失败影响及后续计划
任务失败的影响
ispace公司是一家以“月面商业化”为目标的日本航天初创企业,其商业模式围绕“月球运输服务”为基础,通过为政府、科研机构和民间企业提供月面货运、探测平台和数据服务获取收益。ispace计划通过多次任务积累业绩和信誉,最终参与月球资源开发及建立月面经济生态。然而,这一模式高度依赖任务成功率与外部投资信心的支持。任务的再次失败给ispace带来沉重打击。股价在消息发布当日暴跌近三成,市值大幅缩水。连续两次登月失败不仅使公司短期收益化为泡影,也严重削弱了市场对其持续经营能力的预期。该公司已连续两年亏损,未来在保费谈判、融资及再保险方面都将面临更高门槛。
从技术与产业的角度来看,日本商业航天仍处于关键的探索阶段。日本政府一直积极支持民间航天企业的发展,ispace公司已获得了约1亿美元的政府资金支持。尽管短期内面临技术与财务的双重压力,但ispace承担的月面运输系统研发与探测能力验证任务,仍有望在中长期为日本构建全球月球资源开发体系提供关键技术支点,助力其确立地月空间经济领域的战略地位。
后续计划
ispace公司计划进一步完善系统设计并采取国际合作方式推动未来任务。当前,ispace正集中资源准备任务-3,预计于2027年发射。该任务将采用新一代月面着陆器“巅峰1.0”(APEX 1.0),在设计上强调高可靠性与系统简化,将首次搭载ispace自研的推进系统“虚空行者”(VoidRunner)推进器,与先前使用的A2200发动机相比,其零件数量减少至四分之一,可有效降低故障风险与维护成本,并提高对姿态与速度的控制精度。
针对任务-2中激光测距仪性能不足的问题,ispace已启动关键系统重新选型,明确引入经过飞行验证的导航与测距传感器,并强化传感器与飞控系统之间的接口联调测试。此外,公司将建立更贴近真实任务环境的动态仿真验证体系,特别关注传感器在高速下降过程中的响应性能与数据信号处理的稳定性。通过这一系列措施,ispace力图在任务-3中显著降低导航失效风险,提高着陆自主性和安全性。此次任务还将为NASA的“商业月球有效载荷服务”(CLPS)计划运送科学仪器,是ispace迈向商业服务的重要一环。由于CLPS要求参与商为美国公司,因此该任务由ispace的美国子公司主导。
同时,ispace日本总部也正推进任务-4,将采用全新研制的系列3大型月面着陆平台,计划在2028年后发射。该任务获得日本政府120亿日元[日本经济产业省的小企业创新研究计划(SBIR)资金,约8000万美元]的资金支持,具备长时间运行能力,并可在月夜等极端环境中保持活动。
几点启示
商业登月面临高技术门槛与低成功率困境
近年来,随着全球商业航天的发展,越来越多的商业或非政府机构开始涉足月球着陆探测任务,试图以低成本、高效率的方式推动月面资源探测和技术验证。然而,多项任务的实践反复印证,月球软着陆依然是当前最具挑战性的航天技术之一,涉及系统高度复杂、窗口极短、故障不可逆、环境不可预知等多重不确定性,导致商业化尝试成功率偏低。
以日本ispace公司为例,其先后实施的两次任务均以失败告终。两次任务虽均成功进入月球轨道,但在着陆末期发生致命错误,任务-1因高度误判、推进器提前关闭导致坠毁,任务-2则因激光测距雷达延迟启动,未能及时获得高度数据,从而错过关键减速时机。两次任务的失败均集中在制导、感知与制动环节,体现出月球软着陆的关键节点对系统时序、传感器精度和决策逻辑高度依赖,稍有偏差即可能导致整体失效。其他商业公司同样遭遇类似问题。如太空以色列公司(SpaceIL)的“创世纪”(Beresheet)任务在最后阶段因惯性测量单元重启失败失控坠毁;美国宇宙机器人技术公司(Astrobotic Technology)的“游隼”(Peregrine)月球着陆器在进入月轨后出现推进剂泄漏,任务被迫中止。即便是技术路线较为成熟的公司也未能完全规避风险。美国直觉机器公司(Intuitive Machines)的直觉机器-1(Intuitive Machines - 1)任务实现了全球首个商业月面软着陆,被视为里程碑,而其后续任务直觉机器-2尽管沿用大致相同平台,却仍因技术异常未能完成软着陆。
商业化条件下保障任务可靠性
是当前面临的核心挑战
商业航天机构在追求低成本、高效率的同时,也必须面对航天任务“零容错”的基本属性。尤其是在月球软着陆任务中,任何一个子系统的微小偏差,都可能在极短时间内引发系统性失效。因此,如何在商业化条件下保障任务可靠性,是当前面临的核心挑战。
首先,系统冗余的平衡问题极为突出。传统航天机构的传统做法是通过冗余硬件、多源感知与飞控闭环增强系统鲁棒性,但这对于资源受限的商业公司而言意味着成本不可承受。因此,如何在轻量化平台上实现“功能冗余”而非“设备冗余”,成为关键。以ispace公司的任务-2为例,虽对高度识别系统进行了算法优化与仿真覆盖扩展,但由于激光测距雷达的启动时序仍存在盲区,系统在未能及时识别异常的情况下错失关键制动窗口,说明飞控系统在异常感知与应急响应机制上仍有短板。
其次,在仿真与测试环节,商业航天机构存在资源投入有限、工程体系不完备、经验积累不足以及容错设计能力较弱等问题。这使得其仿真验证往往覆盖范围有限,难以全面反映月面复杂多变的实际环境,成为影响任务稳定性与可靠性的重要因素。月面不同着陆区域的地形起伏剧烈、光照条件多变,且缺乏实时遥测支持,导致传统地面仿真难以涵盖所有变量。因此,必须构建更全面的综合仿真平台,模拟多种极端地形、不同光照环境与感知误差场景,提前训练系统在复杂条件下的识别与判断能力,增强任务的适应性与鲁棒性。
最后,组织与任务管理的工程化能力也是商业航天实现可靠性的关键支撑。即使技术储备充足,若任务架构、风险评估、配置管理等工程流程不规范,也可能导致信息传递断层与响应延误,进而放大微小异常的风险。

据海阳发布消息,捷龙三号遥十二火箭计划 8 月 5 日从海阳近海海上发射,火箭由东方航天港总装出厂,是捷龙三号又一次海上发射任务。
7 月 27 日,穿越者载人航天发布采购预公告,公开遴选商业载人发射火箭合作伙伴,计划采购总计 30 次发射服务,助力亚轨道载人飞行商业化落地。
7月28日,中科宇航联合中科院力学所共建重点实验室,打造双科研平台;力鸿二号、三号分步试飞,自研变推力发动机支撑可重复使用运载器研发。






