姿态和轨道控制是卫星平台的重要组成部分,对星载有效载荷任务的完成起着十分重要的作用。在卫星其他分系统正常工作的情况下,地球同步卫星能否定点、地球同步卫星和太阳同步卫星能否进行轨道保持、返回式卫星能否按指定地点返回、资源卫星能否准确拍照、气象卫星能否给出正确区域云图、中继卫星能否进行星间链路通信、星座卫星间的相对位置能否正确保持等,这都是卫星姿态控制和轨道控制的任务。
卫星姿态控制
卫星姿态控制是指对卫星绕其质心施加外力矩,以保持或按要求改变卫星上一条或多条轴线在空间定向的技术。不同卫星对姿态控制有不同的要求,例如通信广播卫星其天线方向图要覆盖地面上的给定区域;卫星作机动变轨时其变轨发动机要对准所需推力方向;返回式卫星从空间返回大气层时其制动防热面须对准迎面气流方向。一般来说,轨道控制与姿态控制密切相关,为实现轨道控制,卫星姿态必须符合要求,也就是说,当需要对卫星进行轨道控制时,同时也需要进行姿态控制。
卫星姿态控制包括姿态稳定和姿态机动两个方面,前者是保持已有姿态或姿态运动的过程,后者是把卫星从一种姿态转变为另一种姿态的再定向过程。
卫星姿态稳定方式大致可分为两大类,一是自旋稳定,卫星绕其一轴(自旋轴)旋转,依靠旋转动量矩来保持自旋轴在惯性空间的指向。双自旋卫星由自旋体和消旋体两部分组成,自旋体绕自旋轴旋转而获得自旋轴定向,安装着有效载荷的消旋体在自旋轴定向的基础上又受轴承轴上的消旋电机控制而获得三轴稳定;二是三轴稳定方式,依靠主动姿态控制或空间环境力矩的作用来保持卫星的三个正交轴线在惯性空间中定向。
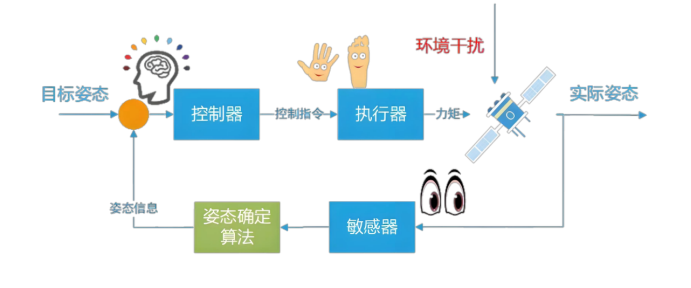
通常用俯仰角、偏航角、滚动角来描述卫星姿态,它们分别对应卫星绕其本体坐标系三个轴的旋转运动。为了确定这三个角度,姿态控制系统需要完成两个核心步骤,一是确定目标姿态,二是确定当前姿态。
确定目标姿态也就是确定卫星任务要求的“理想”指向,例如通信卫星需要将天线精确指向地球上的特定区域,遥感卫星需要将相机镜头垂直对准地面目标,或者太阳帆板需要始终朝向太阳以获取最大能量。目标姿态通常由地面指令注入或星上自主规划系统根据轨道参数和任务需求计算得出。
关于如何知道卫星当前的姿势,这就需要依靠各种传感器来感知,具体包括:红外地球敏感器(通过探测地球边缘的红外辐射来确定地心方向,这是近地卫星最常用的对地定向基准)、太阳敏感器(通过检测太阳光方向来确定太阳矢量,几乎所有的卫星都带,因为要保护电池板)、星敏感器(通过拍摄星空,对比星图,能极其精确地知道卫星在宇宙中的姿态)、陀螺仪(基于角动量守恒原理,通过实时检测物体绕三轴旋转的角速度变化,精准输出姿态与方向信息)。
一旦知道了目标姿态和当前姿态,姿态控制系统就会计算两者之间的误差(即姿态偏差)。然后,控制算法(如PID控制、滑模控制等)会根据这个误差计算出所需的控制力矩,并驱动执行机构产生相应的动作,消除姿态误差,使卫星从“当前姿态”机动到并保持“目标姿态”。简单来说,整个过程就是一个闭环反馈控制:测量当前姿态→与目标姿态比较→计算误差→生成控制指令→执行机构动作→改变姿态→再次测量...
关于执行机构,主要包括反作用轮(这是目前最常用的方式,卫星靠电机给飞轮加速,飞轮转得快了,根据角动量守恒,卫星本体就往反方向转。这种方式的优点是精度高、不消耗燃料,只要有电就能动,缺点是飞轮的力矩和角动量存储容量有限,要让它快速转个大角度,飞轮很快会达到最高转速而饱和,这时候,就需要另一种机构来帮忙了)、控制力矩陀螺(它让一个高速旋转的陀螺框架进动,产生很大的控制力矩,能让卫星快速调头,适合大型空间站或快速机动的大型卫星)、磁力矩器(利用通电线圈在地球磁场中产生力矩,优点是不耗燃料,缺点是力矩非常小,只能用于非常缓慢的机动,或者作为飞轮系统卸载时的辅助手段,低轨卫星常用它来做初始捕获)、推力器(当飞轮饱和或需要快速机动时,用推力器喷气产生力矩,优点是力矩大,缺点是消耗燃料,且喷出的羽流可能污染敏感器件,通常用于大角度机动或紧急救援)。
卫星轨道控制
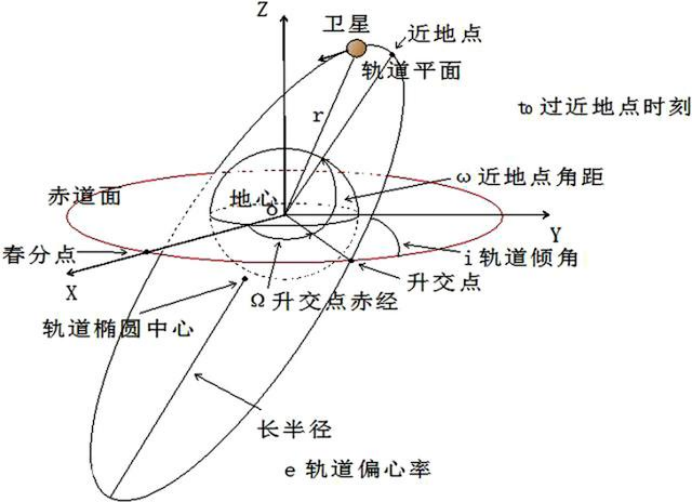
卫星轨道指的是卫星质心在空间中的运动轨迹,轨道由半长轴、偏心率、轨道倾角等六个根数决定。任何轨道控制,本质上都是通过给卫星施加外力(速度增量),改变这几个根数。
卫星轨道控制的任务基本上可以分为四种:变轨控制、轨道保持、返回控制、轨道交会。变轨控制是使卫星从一个自由飞行段轨道转移到另一个自由飞行段轨道的控制,例如地球静止卫星发射过程中,在大椭圆转移轨道的远地点附近进行的进入准同步轨道的变轨机动。轨道保持是使航天器克服空间各种摄动的影响,保持卫星轨道的某些参数不变的控制,例如地球静止卫星为精确地保持定点位置而定期进行的轨道修正;太阳同步轨道和回归轨道卫星为保持其倾角和周期所加的控制;一些低轨卫星为克服大气阻力,延长卫星在轨寿命所进行的控制等。返回控制是使卫星脱离原来的轨道,进入大气层的控制。轨道交会是使一个卫星与另一个卫星在同一时间、以相同的速度到达空间同一位置的过程。
卫星轨道控制的过程主要包括轨道确定、轨道规划与制导、控制执行、轨道保持与修订。
轨道确定主要分为两类:非自主确定和自主确定。
对于非自主确定,由地面站设备(如雷达)对卫星进行跟踪测轨,且在空间测控中心进行数据处理,最后获得轨道位置信息。由于这种轨道确定方法依赖于地面站,因此有很大的局限性,如果要连续跟踪卫星,则需要很多的地面站,而且这些站都要理想分布,这势必要求有些站需要设在本国领土以外或公海上。由此可见,用增加地面站的办法来连续跟踪低轨卫星是不经济的,也是不现实的。
对于自主导航,卫星的运动参数(位置和速度)用星上测轨仪器来确定,且该仪器的工作不取决于位于地球或其他天体的导航和通信,星载导航设备一般包括高度仪、空间六分仪、MANS导航敏感器、GPS导航接收机等。为了完成自主导航任务,有时姿态测量与轨道测量共用一个敏感器,如陀螺和星敏感器等。自主导航系统按照其工作原理可分为4大类:天文导航(测量对天体能敏感的角度来确定卫星的位置,在这种系统中,卫星首先测定它对地球表面的当地垂线,然后以此为基准分别测量三个彼此独立的已知星体的角度,根据这些测量数据,来计算出卫星的位置和姿态信息)、陆标定位(用测量地面目标基准来确定卫星的位置和姿态)、惯性导航(主要是由惯性测量装置、计算机和稳定平台(捷联式没有稳定平台)组成,通过陀螺和加速度计测量卫星相对于惯性空间的角速度和线加速度,然后用星载计算机求出卫星的位置、速度和姿态信息)、信标测距(对已知信标的距离测量,这类系统是确定卫星到三个或更多已知点的距离,然后用三角法解算出卫星的空间位置)。
轨道控制执行靠的是产生推力的装置,具体包括化学推进(推力大,响应快,但是燃料有限,卫星寿命往往取决于剩多少燃料)和电推进(用电能加速带电离子喷出,推力极小,但比冲极高,特别省燃料,常用于地球静止轨道卫星的位置保持、深空探测主推进。目前许多通信卫星(如SpaceX的Starlink V2、波音的702SP平台)全电推进,虽然变轨慢,但能携带更多载荷或延长寿命)。
未来的发展(智能化与自主化)

随着低轨卫星星座的不断发射,传统的“地面计算、指令上传”模式在面对如此高密度的动态环境时,存在通信延迟大、计算负荷过载、响应不及时的致命缺陷。当前低轨卫星(如Starlink V2、我国卫星互联网星座低轨业务星)普遍搭载了激光星间链路,这使得卫星不再依赖地面站中转数据,通过ISL,卫星可以实时共享自身的轨道状态、感知到的空间碎片信息以及邻星的位置,为协同决策提供了数据基础。未来的卫星将不再是执行死命令的终端,基于分布式模型预测控制、多智能体强化学习或博弈论的算法正在被植入星载计算机,当两颗卫星预测到存在碰撞风险时,它们可以通过星间链路直接“对话”,基于预设的博弈规则(如:谁变轨成本更低、谁优先级更高)瞬间计算出最优避让轨迹,并自动执行推力器点火,这一过程无需地面干预,将反应时间极致压缩。SpaceX凭借其庞大的星座规模,实际上已经在实践中被迫向自动化转型,其最新的卫星具备自主机动能力,以应对日益频繁的碰撞预警,减少了对地面操作团队的依赖。在2026年的相关地缘冲突的实际应用中(如美伊局势中的通信保障),低轨星座的去中心化和自愈能力(部分卫星受损或被干扰,网络自动重构)被视为核心优势,这背后就是多智能体协同技术在支撑。

FAA 航行通告显示 7 月 10 日至 13 日某海域上空将有我国火箭残骸坠落,推测对应长征十号乙发射,精确发射时间有待后续海事预警披露。







