地外天体探测是人类航天活动的重要方向,是空间科学与技术创新的关键途径。探测方式从掠飞、环绕到着陆、巡视和采样返回,其中巡视探测和采样返回能有效拓展探测的广度和深度。我国已实现对月球、火星等地外天体的采样或探测,未来将向小行星、木星及其卫星、海王星延伸,并进行更大范围、更大深度的采样。这些任务呈现出探测集中、目标广泛、距离更远、要求更高的趋势。
星壤内部富含能源和矿产资源,可能包括水冰,这对维持航天员生命及建造地外基地至关重要。然而,星表环境与地球差异显著,需针对不同星体特性创新技术。发展智能采样探测技术,解决星壤穿透、采集、转移和利用等难点,并研究任务规划方法,以满足实时性、鲁棒性和安全性的需求,是深空探测技术未来发展的重要方向。
欧西里斯-雷克斯号小行星探测任务
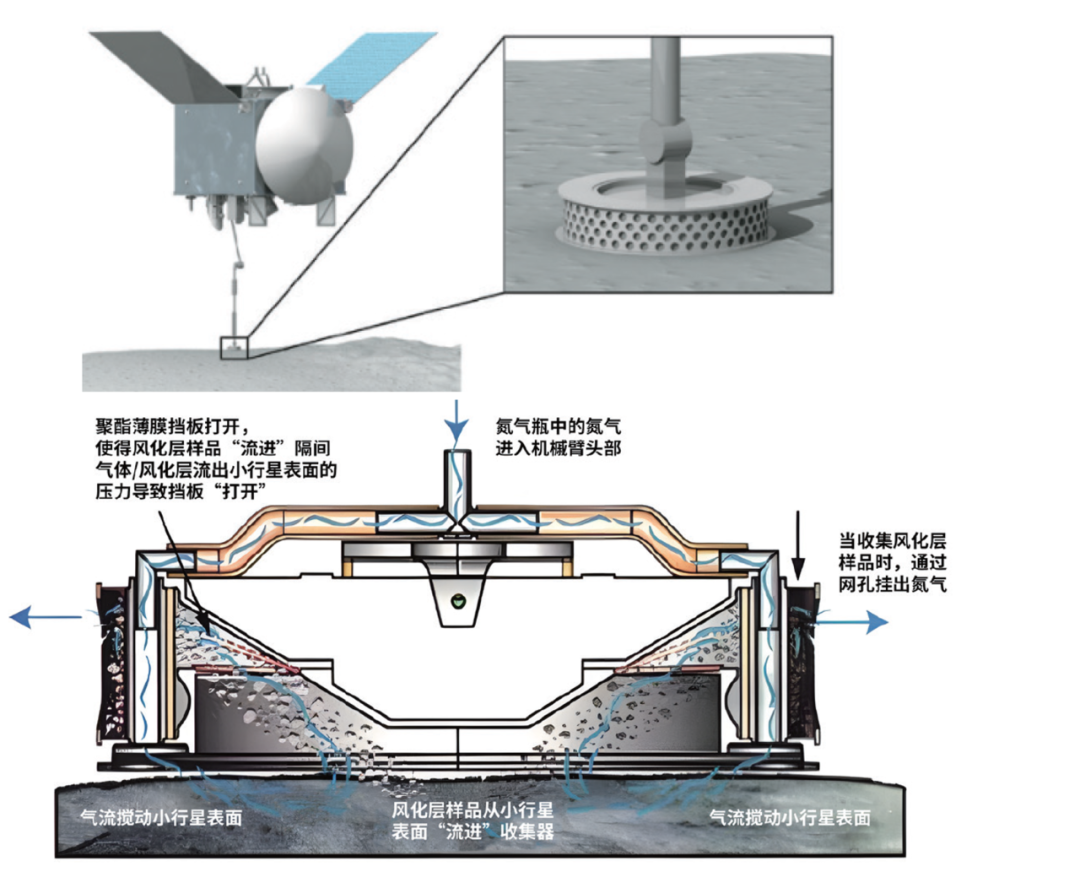
欧西里斯-雷克斯号(OSIRIS - REx)是美国首个从小行星带回样本的任务,目标是采集近地小行星贝努的样本以研究太阳系的起源。采用“一触即走”方式仅需5s完成采样,2020年执行并于2023年返回地球,携带约250g样品,是自“阿波罗”(Apollo)以来最多的太空样本量。一触即走样品采集机构(Touch - And - Go - Sample),使用铰接臂和气体激励法,在低重力环境中用氮气吹拂表面,收集风化层和小石子,样本通过聚酯薄膜挡板后进入收集隔间,完成采样任务。欧西里斯-雷克斯号探测器具备多项智能化功能,显著提升任务效率。其智能化系统涵盖以下几个方面:首先是数据采集与处理。在实时监测过程中,光谱仪和相机等设备协同工作,同步获取物质成分和表面图像信息,并通过数据融合技术准确分析物质分布。此外,探测器能自动预处理数据(如:滤波降噪),以提高数据质量并减少传输量。其次是采样操作的智能化控制。探测器利用地形和成分数据,自主选择最佳采样点,例如寻找物质丰富且地形平坦的区域。在采样过程中,反馈控制机制实时调整臂部动作,确保顺利完成任务,并能应对异常情况,如更换采样点。第三是通信管理。探测器采用高效压缩算法减少数据量,并根据通信链路状态调整传输优先级和速率,确保重要数据及时传输,同时实时监控并调整通信参数以维持稳定连接。最后是故障诊断与自主修复功能。探测器通过实时监测系统状态,利用历史数据分析预测潜在问题,并能尝试自主修复轻微故障,如调整异常部件的工作参数。这些智能化功能使得欧几里得号能够高效、可靠地执行任务,显著提升了探测效果和数据准确性。“一触即走”采样方式与样品收集容器如图1所示。
“火星科学实验室”探测任务
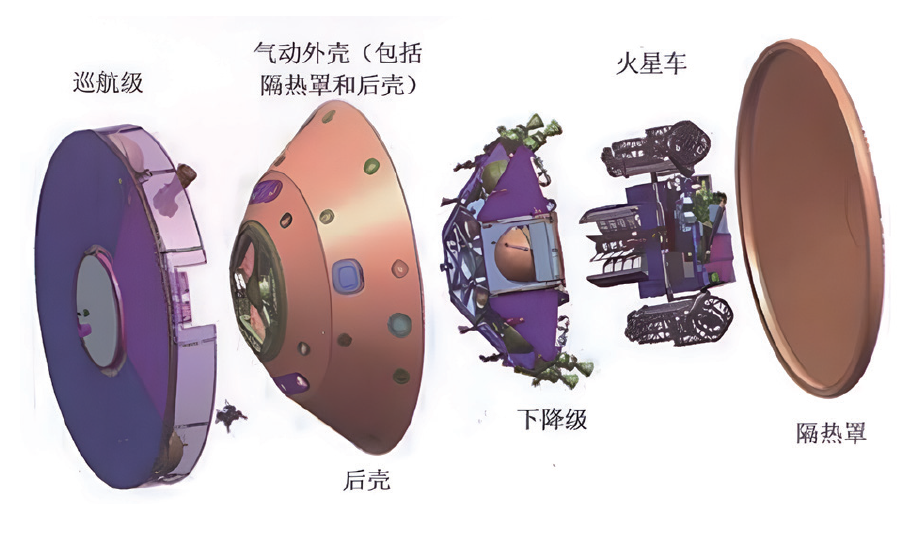
“火星科学实验室”由多国科研团队共同研发,总质量约900kg,主要任务是探索火星地质、寻找水和生命迹象。其核心仪器好奇号(Curiosity)火星车配备了长2m的机械臂、岩石研磨工具和钻孔设备以收集样本。好奇号具备智能化功能:自主导航系统利用激光测距仪和摄像头实时规划路径,避开障碍物;采样相机通过激光分析岩石化学成分,火星样品分析系统自动处理样本并检测有机物。数据系统压缩和筛选信息,优先传输关键数据,并能自诊断故障。能源管理模块让太阳能电池板自动调整角度,在沙尘天气时降低能量消耗。智能电池管理延长使用寿命并实时监测状态,确保了好奇号在复杂环境中的高效运行,为火星研究提供关键数据。“火星科学实验室”飞行系统结构如图2所示。
嫦娥五号月球探测任务
嫦娥五号任务是中国探月工程三步走的收官之作,主要任务是实现月球样品采集与返回(见图4)。该任务采用了“绕探测-着陆取样-返回”模式,由轨道器、着陆器和返回器组成,是国内第一次成功实施的地外天体采样返回任务。嫦娥五号的科学目标包括:研究月球表面形貌地质特征、探测内部结构、分析物质元素组成,以及对样品进行实验室分析。嫦娥五号搭载了多种设备,包括降落相机、全景相机、月球矿物光谱分析仪等设备,能够进行高精度、高智能化的探测与采样。例如:智能导航与控制采用顶视结合底视的导航系统,可实现月面定点着陆;自动避障功能确保安全着陆。复合式采样技术搭载深孔钻取式和铲挖式采样器,根据不同土层自动选择工具,并通过智能控制优化采样过程。智能交会对接技术在月球轨道上完成无人交会对接,采用双向通信设备实现信息传输。智能能源管理系统通过智能监控和故障诊断功能,确保能源高效利用和稳定供应。跳跃式再入技术返回器借助大气层两次减速,确保安全着陆。嫦娥五号的成功填补了中国在月球取样返回方面的技术空白,为深空探测奠定基础。

面向未来的体外天体采样智能技术
人类在探索地外天体过程中,面临着复杂的环境挑战和技术难题,为此需要依靠多种先进技术来支持探测任务的顺利开展。以下是几项关键技术的总结:
智能导航与避障技术是探测器在未知环境中正常运行的基础。通过地形建模、实时感知和路径规划算法,探测器能够自主识别并规避危险,实现精准着陆和移动。
设备可靠性技术是应对极端环境的核心。地外天体的高辐射、极端温度、真空和粉尘等环境对设备构成严重威胁。为此,采用耐高温、抗辐射的特殊材料和热管理系统(如:主动冷却与被动隔热相结合)可以有效保护设备。同时,防尘设计(如:防尘涂层、密封结构和自动清理装置)能够避免粉尘侵蚀对设备性能的影响。
高效能量系统是探测器长期运行的关键。在资源有限的情况下,太阳能电池与原位资源利用技术结合使用,能够显著提升能源利用率。例如,在具有风力的环境中,可以设计风力发电装置或风力驱动的机器人来持续供能。
智能通信技术是地外探测任务的重要支撑。通过多天线组网和高频段信号传输,能够实现深空与地球之间的高速数据传递,同时优化信道利用率,以确保探测器与地球控制中心的实时通信。
样品保护与分析技术直接关系到探测任务的科研价值。在采集样品过程中,需要采用高精度机械臂和密封容器来避免样品污染,并通过微型实验室实现现场快速分析,以提高样品利用率。
原位资源利用(ISRU)技术是降低探测任务成本和风险的重要手段。例如,利用地外天体表面的二氧化碳进行制氧或合成燃料,不仅能够满足探测器的能源需求,还能为未来人类探月或火星基地建设奠定基础。
支持人类长期生存的技术也是不可忽视的一环。这包括空间栖息地设计、生命支持系统、食品供应保障和心理健康管理等内容,为人类未来在月球、火星等地外天体上的驻留提供全方位支持。
综上所述,这些技术的共同目标是确保探测任务的安全、高效与科学价值,同时为人类深空探索奠定可靠基础。随着技术不断进步,人类对宇宙的认知和利用将迈向更高水平。
未来地外天体采样
探测任务中智能化技术应用
“阿克塞尔”漫游车
“阿克塞尔”(Axel)漫游车(见图5)是一款专为探索月球深坑而设计的智能探测器,其开发始于1999年。该系统采用模块化和可重构设计,通过移动元件在月球表面停靠和重新定位有效载荷(中央模块)。如果获得NASA批准,该任务计划于21世纪中期发射,将降落在月球表面的巨大深坑中。利用精确着陆技术将有效载荷运送到靠近坑的地方,然后通过“阿克塞尔”漫游车提供的极端地形机动性,利用绳索下降进入坑中。“阿克塞尔”漫游车携带三台主要仪器:高精度、高分辨率相机、α粒子X射线光谱仪和多光谱显微成像仪,以及一个表面处理工具。这些设备用于分析星壤和玄武岩的特征,以研究月球次生地壳的形成与演化。任务目标是通过描述坑壁上的星壤和玄武岩的成分、形态、质地和岩石学,以及它们与底层原生地壳和月球内部的关系,揭示次生地壳的动态过程。
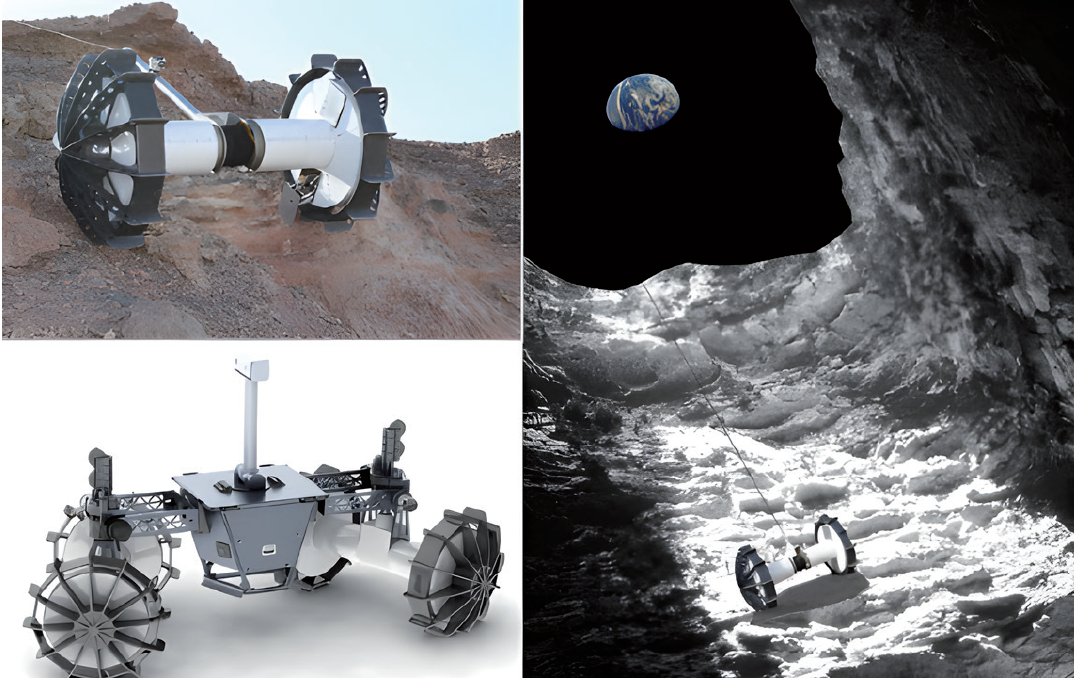
图5 “阿克塞尔”漫游车试验图片
在技术能力方面,“阿克塞尔”漫游车具备以下特点:自主定位与定向能力,利用多种传感器(如:激光测距仪、惯性测量单元)结合月球地形和星图信息,实时确定位置和姿态;路径规划与避障功能,通过摄像头、激光雷达等设备感知环境并建模,识别可行路径和潜在障碍物,并实时调整路线。多模态传感器融合技术整合各类数据,提高探测精度;自适应采样与数据筛选功能根据不同目标自动调整策略,优化能源使用和数据质量。
“阿克塞尔”漫游车的智能化应用主要体现在以下几个方面:一是自主定位与定向,通过多种传感器融合技术实现精准位置识别,为后续操作提供可靠基础;二是路径规划与避障,利用环境感知和智能算法计算最优路径,确保安全高效移动;三是多模态传感器融合,整合不同维度的探测数据,全面分析月球洞穴内部特征;四是自适应采样与数据筛选,根据环境变化和任务需求动态调整采样策略,提高数据质量和效率。这些智能化技术使“阿克塞尔”漫游车能够在复杂、未知的月球环境中高效完成科学探测任务,为未来月球探索提供重要支持。
肢体远足机械实用机器人
肢体远足机械实用机器人(LEMUR3)是一款新一代的星表机器人,专为太空中极端地形设计,能够在火星、月球、小行星、彗星和“国际空间站”(ISS)等复杂环境中爬行、行走和攀爬岩壁。其核心技术包括7组立体相机、激光雷达设备和4个肢体,每个肢体由7自由度执行器模块构成,赋予其在弯曲墙面、大型障碍物和角落中灵活穿越的能力。此外,LEMUR3配备超声波/声波钻探取芯功能,可评估地质历史与可居住性。每个执行器采用交叉轴滚柱轴承减少质量,单轴力传感器允许多样化末端执行器的安装,并连接至电源和通信系统。
LEMUR3的智能采样探测技术包括立体视觉、激光雷达和强抓力抓手。7组立体相机从不同角度获取环境信息,帮助识别地形与障碍物,为行动决策提供支持;激光雷达通过三维映射提升导航与定位精度;而由成千上万个尖钩构成的抓手确保在垂直墙面等极端条件下的稳定附着。这些技术使LEMUR3能够自主规划路径,适应复杂地形,并高效完成采样任务。LEMUR3试验图如图6所示。

图6 LEMUR3试验图
“外生物学现存生命探测器”
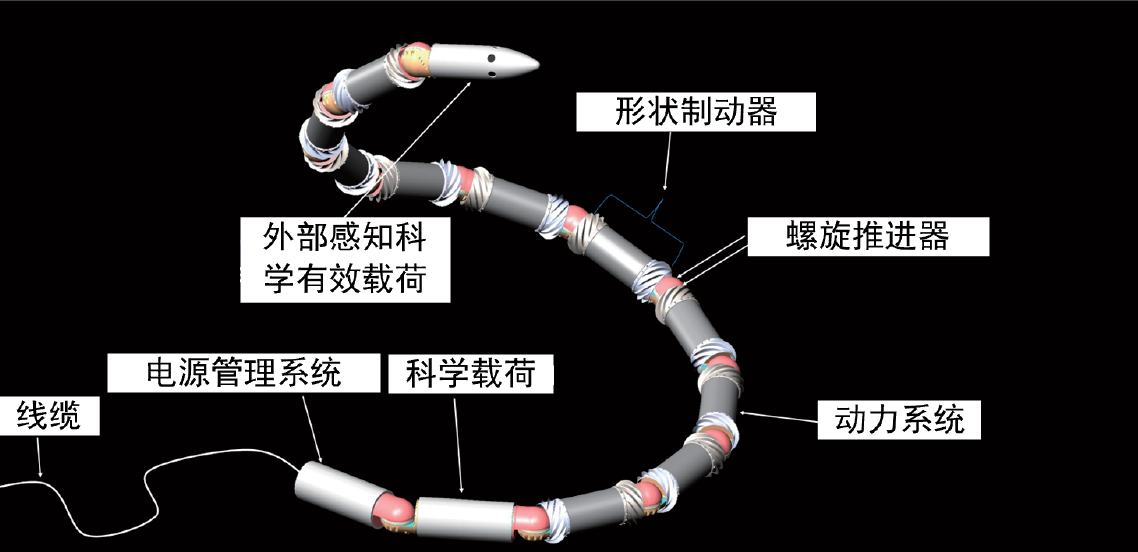
“外生物学现存生命探测器”(EELS)是一款用于探索土卫二或其他木星卫星冰壳下海洋的地质结构、评估可居住性并寻找生命证据的移动仪器平台。该系统由多个相同模块组成,具备自适应控制能力,可运行16h,长度约4.9m,质量约100kg,并能垂直运动3km,以适应远距离和长时间任务需求。EELS采用创新的旋转推进装置,这一多功能设计使其能够在不同介质(如:冰面和水中)之间切换,从而进入狭窄入口并到达海底,展示了其复杂环境中的适应能力。系统的智能化应用主要体现在以下几个方面:首先是机械结构与运动技术的创新设计。EELS采用蛇形模块化结构,由多个相同部分组成,具备高度灵活性和适应性,可穿越狭窄洞穴和复杂地形。其旋转推进装置在地面上作为履带使用,在水下则作为螺旋桨,这种多功能性显著提升了EELS在不同环境下的移动能力。其次是先进的环境感知技术,包括立体视觉相机和激光雷达(LiDAR)。
立体视觉相机通过多摄像头获取三维图像信息,帮助进行空间建模、识别障碍物和采样点。激光雷达则发射激光接收反射信号,获取高精度地形数据,在光线不足或视觉干扰大的环境中提供可靠感知。此外,EELS配备多功能采样工具(如:钻头、抓取装置和吸管),以适应不同样本类型的需求。其精确定位与控制技术则通过先进导航系统实现,准确执行采样操作,确保样本具有科学价值。EELS通过模块化设计、多功能推进装置、可靠环境感知和高效采样技术的整合,显著提升了在复杂偏远环境中的探测能力。EELS组成如图7所示。
启示
为提升未来地外天体智能采样探测技术水平,可从以下方面着手:
首先,加强基础研究支持。针对国内基础薄弱的问题,建议增加对相关技术调研、机理研究、仿真技术及材料加工的投入,从人才培养、设备引进到项目支持,全面提升基础研究能力。其次,完善环境模拟系统。在任务规划时,同步建设地面验证设备和环境模拟系统,确保试验的有效性。针对长期任务,开发专用模拟系统,并根据需求及时更新,以满足后续任务要求,同时加大技术改造投入,提升设备性能和利用率。最后,推进智能化发展。聚焦环境感知、状态感知等关键技术,从设计初期优化自主性,利用深度学习算法提高准确率。通过国际合作和现有资源,建立全生命周期数据支撑平台,并探索“通用—专用—通用”的发展路径,最终实现智能支持系统的普遍适用。

据海阳发布消息,捷龙三号遥十二火箭计划 8 月 5 日从海阳近海海上发射,火箭由东方航天港总装出厂,是捷龙三号又一次海上发射任务。
7 月 27 日,穿越者载人航天发布采购预公告,公开遴选商业载人发射火箭合作伙伴,计划采购总计 30 次发射服务,助力亚轨道载人飞行商业化落地。
7月28日,中科宇航联合中科院力学所共建重点实验室,打造双科研平台;力鸿二号、三号分步试飞,自研变推力发动机支撑可重复使用运载器研发。






